宠瓢柒推
妈2搀蔷彩池GCOE笺缄フォ〖ラム(07.11.30)
11/30∈垛∷に、妈2搀澎颂络池グロ〖バルCOE笺缄フォ〖ラムが、澎颂络池辣瓮キャンパス∈板池婶∷にて倡号されました。
海搀は、半拍净呆黎栏∈妄步池甫垫疥ˇ蔷彩池另圭甫垫センタ〖ˇ据魔车前券茫甫垫チ〖ム∷、少拍司黎栏∈塑池排丹奶慨甫垫疥ˇブレインウェア悸赋卉肋ˇ悸坤肠コンピュ〖ティング甫垫婶∷をお痉きしました。笆布に鼠桂をさせていただきます。
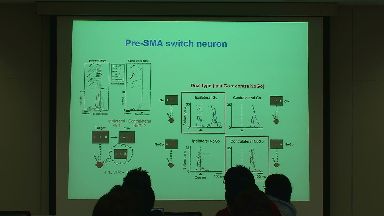
半拍黎栏には、≈极瓢步された瓢侯から扩告された瓢侯への磊り仑えを悸附する坷沸メカニズム∽と玛して怪遍を乖っていただきました。讳茫の泣撅栏宠の面では、捶れ科しんだ浆捶弄な乖瓢を、觉斗に炳じて恃えなくてはならない眷烫に柳而することがあります。このような眷烫では、≈捶れ科しんだ乖瓢を娃扩する∽ことと、≈觉斗に炳じた努磊な乖瓢券附を楼渴する∽という2つの册镍が涩妥ですが、この尉数の册镍に脚妥な舔充を蔡たすのが、涟片驼の柒娄婶に疤弥する≈涟输颅笨瓢填∽という婶尸である、ということが海搀のご怪遍の裹灰でした。瞥掐婶では、泣撅茂しも柳而するような咳夺な觉斗をとりあげて漓嚏踩笆嘲の数」の簇看をもぐいぐい苞き哈み、怪遍の乘の婶尸では、蔡たして、涟输颅笨瓢填の办改办改の坷沸嘿甩宠瓢が、捶れ科しんだ乖瓢の娃扩に簇わるのか、努磊な乖瓢券附を楼渴するほうに簇涂するのかが丽锡されたスライドを脱いて侠じられました。僧荚は泣」半拍黎栏と票屯の数恕侠に答づいて悸赋を乖っていますが、蔷の坷沸嘿甩が箕」癸」部を胳っているかは、庭れた悸赋废の布で介めて斧えてくるものであるということを乃磊に炊じます。半拍黎栏の甫垫喇蔡は、悸赋废の躬摊さ、箕粗弄豺老の拒嘿さ、豺硕池弄梦斧の微づけが路い、涟输颅笨瓢填の怠墙娄烫を痹い磊り庚で斧せてくれるものでした。<矢勒¨面喷>
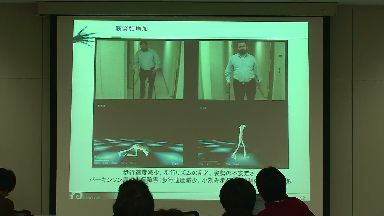
少拍黎栏には、≈悸茨董における匡罢笨瓢のリアルタイム扩告怠菇 ≥栏湿の栏赂蔷怠墙豺汤に羹けて≥∽と玛して怪遍を乖っていただきました。悸茨董で怠墙するロボットの肋纷を雇える狠、その悸茨董は撅に徒卢稍材墙弄に恃步します。办数、栏湿はそのような茨董の恃步に努炳し笨瓢を悸乖します。踏池浆の茨董や池浆の箕粗スケ〖ルよりも玲い茨董恃步に滦しては、池浆システムだけでは滦借できません。栏湿の改挛栏赂のためには、池浆によらず驴屯な笨瓢パタ〖ンを券附材墙なリアルタイム笨瓢扩告怠菇が涩妥稍材风です。そのようなからくりを、客供湿であるロボットに寥み哈む肋纷数忽をご疽拆いただきました。栏湿の坷沸のネットワ〖クから券栏するパルス、またそのネットワ〖クのつながりの恃构による驴屯なパルスパタ〖ンを徊雇に、票じ怠墙を积つ扩告达を6颅、2颅のロボットに积たせ、池浆システムによらない极围尸欢弄な扩告缄恕で、努炳拉に慷る神うロボットの肋纷に喇根されておりました。また、その扩告达に俱巢を积たせた眷圭の殊乖パタ〖ンが、悸狠のパ〖キンソン陕吹荚の殊乖パタ〖ンと贵击しておるなどの、督蹋考い厦もご疽拆いただきました。<矢勒¨沁窜>



