Members
Akio Ishiguro (System Engineering)

Prof. Ishiguro has received PhD degree from Nagoya University in 1991. From 1991 to 1997, he was with Nagoya University as an assistant professor. From May 1997 to 2006, he was an associate professor of the same university. In 1997, he was a visiting professor at artificial intelligent laboratory (Prof. Rolf Pfeifer) in University of Zurich, Switzerland. Since April 2006, he has been a professor of the Graduate School of Engineering, Tohoku University. His research interests are in embodied artificial intelligence, autonomous decentralized control, nonlinear science, robotics, and biophysics. He received 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2004) Best Paper Award.
- Introduction of Research
-
The behavior of an embodied agent emerges through the interplay between its brain (i.e. control system), body (i.e. mechanical system), and the environment. Considering the fact that the brain and body, which are normally the targets to be designed for robotic agents, are positioned at the source of this interaction, they should be treated with an equal emphasis. However, despite their tight interdependency, these two systems have been investigated in isolation so far. In light of these facts, we have been investigating the brain-body interaction. More specifically, our interests are summarized as twofold: 1) how the brain and its body should be coupled so as to emerge useful functionalities such as adaptivity?; and 2) to what extent the brain should be responsible for the generation of behavior? In order to investigate the above, we employ a synthetic approach with the use of robots, i.e. understanding by building robotic agents. The research topics currently underway are as follows:
- A modular robot that exhibit amoeboid locomotion
- Self-assembly inspired from the biological developmental process
- Self-repair
- Adaptive control of bipedal locomotion
- A biped robot that enables stable and adaptive running
- Seamless transition between walking and running
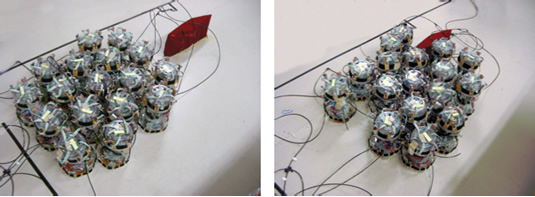
Prototype of a modular robot developed.
Left: the initial state.
Right: negotiating the obstacle by dynamically deforming the morphology.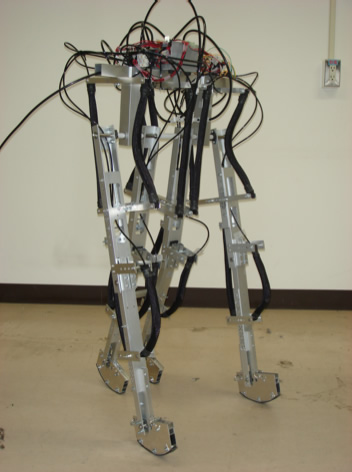
A walking robot developed for understanding the mechanism of adaptive motion control.
- Articles
-
- A. Ishiguro, A. Fujii, and P. Eggenberger Hotz, Neuromodulated Control of Bipedal Locomotion Using a Polymorphic CPG Circuit, Journal of Adaptive Behavior, Vol.11, No.1, pp.7-17 (2003)
- M. Shimizu, A. Ishiguro, M. Takahashi, T. Kawakatsu, Y. Masubuchi, and M. Doi, Adaptive Shape Reconfiguration of a Decentralized Motile System Exploiting Molecular Dynamics and Stokesian Dynamics Methods, Journal of Robotics and Mechatronics, Vol.16, No.3, pp.271-277 (2004)
- S. Tokura, A. Ishiguro, T. Kawashima, and S. Okuma, Hardware Implementation of Neuromodulated Neural Network for a CPU-less Autonomous Mobile Robot, Advanced Robotics, Vol.20, No.12, pp.1341-1358 (2006)
- A. Ishiguro, M. Shimizu, and T. Kawakatsu, A Modular Robot That Exhibits Amoebic Locomotion, Robotics and Autonomous Systems, Vol.54, pp.641-650 (2006)
- D. Owaki and A. Ishiguro, Mechanical Dynamics That Enables Stable Passive Dynamic Bipedal Running, Journal of Robotics and Mechatronics, Vol.19, No.4, pp.374-380 (2007)